# 리눅스 커널 - 디바이스 드라이버(Hello 모듈 실습)
linux-kernel 5 / 6
11 min read
목차
리눅스 커널 - 디바이스 드라이버
오늘의 공부 목차
- 드라이버 개념 이해
- 드라이버의 종류
- 실습 준비
1. 드라이버 개념 이해
- 디바스 드라이버 = 커널이 하드웨어랑 대화하는 통역사라고 생각하면 된다.
- 예시
- 키보드 입력 → 드라이버가 읽어서 커널에 전달 → 프로그램이 사용
- 네트워크 카드 → 드라이버가 패킷 주고받음
- 리눅스 드라이버 형태
- 빌트인 (Built-in)
- 커널 컴파일 시 아예 포함됨 (
y옵션) - 부팅 시 항상 커널 안에 존재
- 커널 컴파일 시 아예 포함됨 (
- 모듈(Module)
- 필요할 때
insmod/modprobe로 삽입 가능 (m옵션) - 메모리 절약 + 유지보수 편함
- 필요할 때
- 빌트인 (Built-in)
- 리눅스는 모놀리식 커널 (Monolithic Kernel)
- 커널 공간에서 모든 핵심 기능 + 드라이버가 동작
- 모듈 시스템 덕분에 “유연한 모놀리식”이라고도 불림
- 윈도우 = 하이브리드 커널 (Hybrid Kernel)
- NT 커널 구조: 마이크로커널 + 모놀리식 특성 혼합
- 일부 기능(윈도우 서브시스템 등)은 유저 모드 서비스로 동작
2. 드라이버의 종류
2-1. 캐릭터 디바이스 (Character Device)
- 특징
- 데이터를 바이트 단위로 차례대로 읽고 쓰는 장치
- 스트림(stream)처럼 순차적으로 입출력 → “파일처럼 한 글자씩 처리”
- 예시
/dev/tty→ 터미널 (키보드 입력, 화면 출력)/dev/null→ 쓰면 버려지고, 읽으면 아무 것도 없는 장치
- 비유: 수도꼭지에서 물이 한 줄기로 계속 흐르는 것처럼 “한 줄 흐름”
2-2. 블록 디바이스 (Block Device)
- 특징
- 데이터를 **블록 단위(일정 크기, 보통 512B~4KB)**로 묶어서 입출력
- 랜덤 액세스 가능 → 특정 블록만 읽거나 쓸 수 있음
- 예시
- HDD, SSD, SD카드
- 리눅스에서
/dev/sda,/dev/mmcblk0같은 장치
- 비유: 책을 생각하면, 한 장(=블록) 단위로 바로 펼쳐볼 수 있음
2-3. 네트워크 디바이스 (Network Device)
- 특징
- 데이터를 패킷 단위로 송수신
- 일반 파일처럼 read/write가 아니라, 네트워크 스택을 통해 send/recv
- 예시
eth0(유선 이더넷)wlan0(무선 WiFi)
- 비유: 편지를 보내면 “봉투(패킷)” 단위로 이동하는 것과 비슷
보충 개념
- 바이트 단위
- 데이터의 최소 표현 단위 (1 byte = 보통 8bit = 숫자 0~255 표현 가능)
- 캐릭터 디바이스는 이 최소 단위로 순서대로 입출력
- /dev/sda
- 리눅스에서 첫 번째 SCSI/SATA 디스크를 의미
- Windows의
C:드라이브와 비슷하게 보일 수 있지만, 완전히 같진 않음- Windows: 드라이브 문자(
C:,D:) - Linux: 디바이스 파일(
/dev/sda,/dev/sdb) + 마운트 포인트(/,/home등)
- Windows: 드라이브 문자(
- 예:
/dev/sda1= 첫 번째 디스크의 첫 번째 파티션
정리하면:
- 캐릭터 → 한 글자씩 (순차 스트림)
- 블록 → 덩어리 단위 (랜덤 액세스 가능)
- 네트워크 → 봉투 단위 (패킷 전송)
/dev/sda는 리눅스의 “디스크 장치 파일”이지 WindowsC:처럼 고정된 건 아님.
3. 실습 준비
실습에 앞서 라즈베리파이3b가 있어서 라즈베리파이로 실행했다.
- Ubuntu / Raspberry Pi 환경에서 커널 헤더 설치:
Terminal window sudo apt updatesudo apt install build-essential linux-headers-$(uname -r)
라즈베리파이에서 커널 드라이버를 만들려면 두 가지 도구가 필요하다.
- build-essential
- 쉽게 말해서 C언어 프로그램을 만들 수 있는 기본 공구세트
- 안에 들어있는 것들
- gcc → 컴파일러
- make → 실행기
- 기타 라이브러리
- 드라이버도 결국은 c언어로 쓰인 프로그램이라서 필요함
- raspberrypi-kernel-headers
- 리눅스 드라이버는 커널과 직접 대화해야 한다.
- 근데 커널은 너무 크고 복잡하다. 우리가 직접 모든 코드를 볼 필요가 없다.
- 대신 “커널이 이런 기능을 이렇게 쓸 수 있어” 라고 정리된 설명서(헤더 파일)가 필요하다.
- 라즈베리파이에 설치된 커널 버전과 똑같은 헤더를 설치해야 드라이버가 정상적으로 빌드된다.
- 맞는 헤더가 에러 뜨고 빌드 실패
- 작업용 디렉토리 만들기:
mkdir ~/driver_dev && cd ~/driver_dev- Hello Driver 모듈 코드
hello_driver.c
#include <linux/module.h>#include <linux/kernel.h>#include <linux/init.h>
// 모듈이 로드될 때 실행static int __init hello_init(void){ printk(KERN_INFO "Hello, thunder's first driver!\n"); return 0;}
// 모듈이 제거될 때 실행static void __exit hello_exit(void){ printk(KERN_INFO "Goodbye, driver!\n");}
module_init(hello_init);module_exit(hello_exit);
MODULE_LICENSE("GPL");MODULE_AUTHOR("thunder");MODULE_DESCRIPTION("Simple Hello World Driver");5. Makefile
Makefile
obj-m += hello_driver.o
all: make -C /lib/modules/$(shell uname -r)/build M=$(PWD) modules
clean: make -C /lib/modules/$(shell uname -r)/build M=$(PWD) clean명령어 해부
make -C /lib/modules/$(shell uname -r)/build M=$(PWD) modules1. make
- 리눅스 커널이 제공하는 Kbuild Makefile을 실행.
- 즉, “커널 빌드 시스템”을 불러내는 명령어.
2. C /lib/modules/$(shell uname -r)/build
C옵션 = 이 디렉토리로 들어가서(make chdir) Makefile 실행하라는 뜻./lib/modules/$(shell uname -r)/build$(shell uname -r)→ 현재 커널 버전 문자열 (6.1.21-v7+)/lib/modules/6.1.21-v7+/build→ 현재 커널 빌드 디렉토리 (커널 헤더가 있는 곳)
- 즉, 현재 커널 헤더 빌드 시스템으로 들어가라는 뜻.
3. M=$(PWD)
M변수는 모듈 소스 코드가 있는 디렉토리를 의미.$(PWD)→ 지금 네가 있는 디렉토리 (~/driver_dev)- 즉, “내가 모듈 소스를 여기 두었으니, 여기서 빌드해줘” 라는 뜻.
4. modules
- 커널 빌드 시스템에 정의된 타겟(target) 이름.
- “외부 모듈을 빌드해라”라는 명령.
- 따라서 위 전체 명령은:
“커널 빌드 시스템을 불러와서, 내 디렉토리(M=$(PWD))에 있는 소스로 모듈을 컴파일해라”
정리
make= 커널 빌드 시스템 실행C .../build= 커널 소스/헤더 디렉토리로 이동M=$(PWD)= 현재 내 모듈 소스 있는 디렉토리 지정modules= “모듈 빌드하라” 타겟 실행
흐름도
┌─────────────────────┐│ make │ ← "빌드 해줘!" 실행└──────────┬──────────┘ │ ▼┌─────────────────────┐│ -C /lib/modules/... │ ← 현재 커널 버전 빌드 시스템 디렉토리로 이동│ (커널 헤더 & Kbuild)│└──────────┬──────────┘ │ ▼┌─────────────────────┐│ M=$(PWD) │ ← 내 모듈 소스(hello_driver.c)가 있는 경로 알려줌└──────────┬──────────┘ │ ▼┌─────────────────────┐│ Target: modules │ ← "외부 모듈 빌드" 명령 실행└──────────┬──────────┘ │ ▼┌─────────────────────┐│ 결과물 생성 ││ hello_driver.ko │ ← 커널 모듈 파일 완성!└─────────────────────┘6. 빌드 & 실행 과정
6-1. 모듈 빌드
makehello_driver.c→hello_driver.o(중간 산출물)hello_driver.o→hello_driver.ko(최종 커널 모듈)
6-2. 모듈 삽입
sudo insmod hello_driver.ko- 커널 공간에 모듈 삽입
hello_init()함수 실행 → 로그 출력
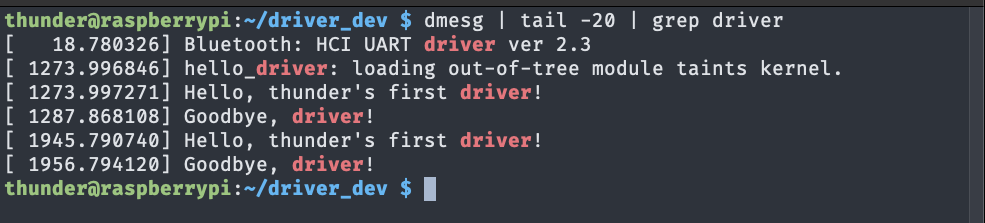
6-3. 로그 확인
dmesg | grep thunder출력 예시:
[ 1273.997271] Hello, thunder's first driver!6-4. 모듈 제거
sudo rmmod hello_driverdmesg | grep thunder출력 예시:
[ 1287.868108] Goodbye, driver!최종 로그
7. 실습으로 알게 된 점
-
커널 모듈의 개념
- 커널에 동적으로 추가/삭제할 수 있는 코드 조각
- 전체 커널을 다시 빌드하지 않아도 기능을 확장할 수 있다.
-
모듈 생명주기
hello_init()→ insmod 시 실행hello_exit()→ rmmod 시 실행
-
로그 출력 방식
- 커널에는
printf가 없음 → 대신printk사용 - 결과는
dmesg로 확인
- 커널에는
-
모듈이 올라가 있는지 확인
Terminal window lsmod | grep hello_driver→ 현재 로드된 모듈 리스트에서 확인 가능
8. 웹 개발 비유로 이해하기 (쉽게 설명)
- 커널 = 웹 서버(Spring Boot)
- 모듈(.ko) = 컨트롤러/플러그인
- hello_init() = @PostConstruct (초기화)
- hello_exit() = @PreDestroy (정리)
- printk → dmesg = System.out.println → 로그
즉, 오늘 한 건 “실행 중인 서버에 HelloController 하나 붙였다가 뗀 것”과 동일하다
오늘의 공부 정리
커널은 하드웨어와 운영체제가 실시간으로 소통하는 창구 같은 존재다.
운영체제 과목 공부를 할 때는 항상 암기식으로만 접근해서, 뭔가 겉도는 느낌이 있었다.
그런데 오늘은 리눅스 커널에 직접 모듈을 올려보고(insmod), 로그를 출력해보며(dmesg)
추상적이던 개념이 조금 더 구체적으로 와닿았다.
마치 뭉개구름 같던 그림이 점점 해상도가 올라가는 느낌이라고 할까?
아직 공부할 부분은 산더미지만,
꾸준히 실습하며 커널의 동작 원리를 내 것으로 만드는 그날까지 달려가 보자!